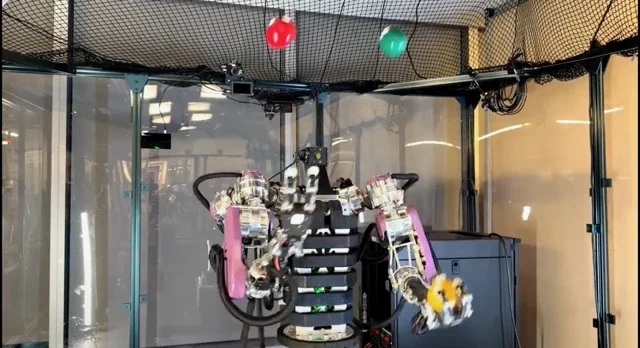
机器人界的“教父”级人物、Boston Dynamics 创始人 Marc Raibert 再次出手。由他领导的机器人与人工智能研究院(RAI)近日揭开了 AthenaZero 的神秘面纱——这是一款双臂机器人,它的动作不再像传统的工厂机械那样生硬刻板,反而透着一种人类般的灵动。
在 4 月 7 日发布的官方博客中,RAI 详细介绍了这款原型机。AthenaZero 专为“动态操控”(dynamic manipulation)而生,这正是机器人领域最顶尖的挑战之一:如何让两只手臂像人手一样,既快速又优雅地协同工作。
大多数工业机器人因为高减速比的设计,往往显得笨拙且“轴”。但 AthenaZero 走的是完全相反的路。这台身高约 1.6 米的机器人拥有两只 7 自由度(DoF)的手臂,设计核心在于极低的惯性和极高的加速度。其背后的“秘密武器”是准直驱执行器(quasi-direct drive actuators),这赋予了机器人极高的“力透明度”。这意味着它能瞬间完成角色切换:上一秒还在使出浑身解数搬运重物,下一秒就能以极度柔顺、细腻的触感处理易碎品。这种在力量与精准之间的丝滑切换,是传统机器人极难实现的,稍有不慎就会造成设备损毁或环境破坏。
RAI 的野心并不止于给躯干安上两条手臂。他们的目标是打造一个能够自主学习并精通复杂协调动作的平台。双臂协作对于自动化任务至关重要,尤其是那些单臂机器人无法企及的领域——比如组装精密产品、搬运大型或易变形的物体,或者处理任何非标准化、非重复性的工作。
为什么这很重要?
几十年来,自动化几乎等同于“有力无脑”的机械臂在重复单调的动作。**机器人与人工智能研究院(RAI)**正试图从两端发力破解这一难题:一方面打造像 AthenaZero 这样具备强大物理交互能力的硬件,另一方面开发控制它所需的 AI 和强化学习模型。
通过从底层构建一套专为“基于学习的控制”而设计的系统,RAI 正在向“通用操纵器”这一终极目标迈出坚实一步。这种基础性研究最终将打破机器人身上的枷锁,让它们从工厂的围栏中走出来,进入充满不确定性的现实世界。
