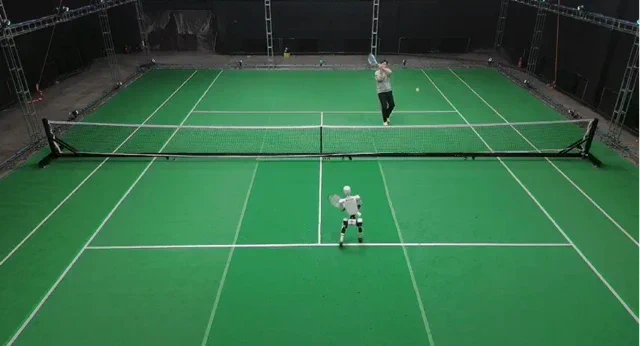
意料之外,却又在情理之中。如果你一直在关注机器人领域的突飞猛进,接下来的这一幕你一定不会陌生:一位研究员开发出的机器人,在掌握了一项新技能后,转身就把自己的“师傅”给虐了。这次较量的战场是网球场,而这个名为 LATENT 的项目,成功让一个人形机器人学会了挥拍。有趣的是,它学习的素材并非教科书级的职业动作,而是来自一堆“并不完美”的人类动作捕捉片段。结果呢?它现在不仅能接球,还能在多回合拉锯战中游刃有余。
由 清华大学 和 Galbot Inc. 团队领衔的这项研究,直击机器人学的一个核心痛点:如何在没有“完美说明书”的情况下,教机器人学会复杂而敏捷的动作。他们的系统从破碎、甚至有瑕疵的人类网球动作中学习并构建了一个“潜动作空间”(latent action space)。其中的“秘密武器”是一个高层 AI 策略,它扮演着数字教练的角色,负责修正并组合这些不完美的原始技能,从而让机器人能准确地将球击回过网。整个进化过程先在模拟环境中完成,随后通过 sim-to-real 技术,成功部署到了真实的 Unitree G1 人形机器人身上。

俗话说,是骡子是马,拉出来练练。领衔作者 Zhikai Zhang 坦言,机器人的成长速度惊人。“在实机部署的第一天,机器人连我发的一个球都接不住,” Zhikai Zhang 说道,“但到了项目最后一天,我已经完全打不过它了。”对于那些想要深入钻研技术细节,甚至想亲手训练一个“网球球王”的开发者,团队已经公开了项目详情和代码。点击链接了解更多:项目主页 以及 GitHub 仓库。
为什么这很重要?
这不仅仅是为寂寞的网球爱好者找个陪练那么简单。LATENT 系统的真正突破在于它对“残缺数据”的处理能力。以往,训练机器人需要极其昂贵、经过精细人工标注的数据集,这往往费时费力。通过学习如何修正和组合那些不完美的示例,这种方法可以极大地加速机器人学习复杂现实任务的进程。这是迈向通用机器人的重要一步——未来,无论是在仓库搬运还是灾难救援等不可预测的环境中,机器人都能在没有“完美示范”的情况下,实现“岗前培训”和自我进化。