如果你觉得双足机器人最近终于把“走路”这件小事整明白了,那 Robotics & AI Institute (RAI Institute) 可能会给你泼一盆冷水——有时候,与其费劲巴拉地迈步子,不如直接“滚”起来。
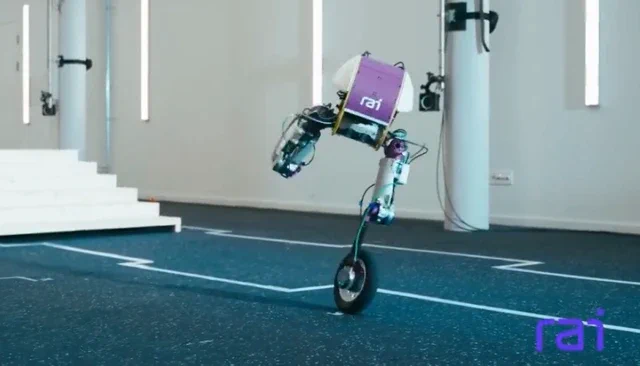
由波士顿动力(Boston Dynamics)创始人 Marc Raibert 亲自坐镇的研究机构,近日揭晓了一款名为 Roadrunner(走鹃)的原型机。这位体重仅 15 公斤(33 磅)的轻量级选手彻底抛弃了传统的“脚”,取而代之的是一对轮子。它展现了一种极具魅力的混合移动模式:既能像平衡车一样并排驱动,也能像滑轮滑一样前后纵向滑行,甚至还能通过小幅度的跨步动作来逾越障碍。
这款机器人的腿部采用了完全对称的设计,膝关节可以自由地向前或向后弯曲,赋予了它极其灵活的姿态。但真正的“黑科技”并不在硬件本身,而是在于它的“大脑”。RAI Institute 表示,他们仅通过一套统一的控制策略(Single control policy),就搞定了 Roadrunner 所有的复杂动作。这使得包括从地面起身、单轮平衡在内的多种高难度行为,在物理机器人上实现了“零样本迁移”(Zero-shot transfer)——这意味着在仿真环境训练完成后,第一次实机运行就完美成功,无需任何针对硬件的繁琐微调。

从模拟到现实的“零样本迁移”是机器人学领域的一座重要里程碑。它极大地压缩了机器人的开发周期和成本,毕竟在传统流程中,为了填补虚拟与现实之间的“鸿沟”,往往需要进行漫长且痛苦的参数调试。通过在仿真环境中训练出足够鲁棒(Robust)的策略,RAI Institute 让 Roadrunner 能够瞬间“领悟”自身的动力学特性,并将所学技能即刻应用于现实世界。
为什么这很重要?
腿轮复合型机器人其实算不上什么新鲜概念——波士顿动力自家的 Handle 机器人早在几年前就曾惊艳四座。然而,Roadrunner 的轻量化设计以及更先进的统一 AI 控制系统,指向了一个更具实用性、且更具成本优势的未来。它完美结合了轮式在平地上的高能效,以及足式在处理复杂地形时的灵活性,这让它在物流仓储等环境场景中极具竞争力。
当全尺寸人形机器人还在苦练走路、跑步甚至后空翻时,Roadrunner 却在暗示另一条进化路径:敏捷与效率,或许比单纯模仿人类形态更为重要。用单一 AI 模型精通多种移动形态,这不仅仅是一个精妙的实验室技巧,更是一项底层技术突破,它将让多功能机器人在现实世界的部署变得前所未有的简单。