增加第三台机器人不应该让你的整个系统陷入瘫痪,但对于大约 90% 的机器人研发团队来说,这正是他们面临的残酷现实。多机器人协作的复杂性——过度依赖中心化控制器和高带宽通信——长期以来一直是制约行业发展的“老大难”瓶颈。然而,Oregon State University 的研究人员刚刚发布了一份未来蓝图:机器人团队可以像蚂蚁搬家一样,凭借一种无声的、涌现式的智能进行协作。
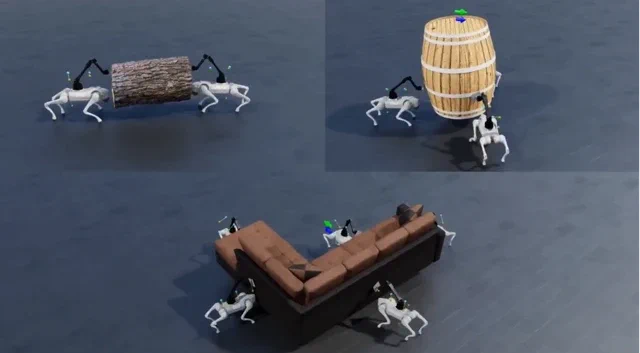
他们的最新论文 decPLM (Decentralized Pinch-Lift-Move) 已被机器人领域的顶级盛会 IEEE International Conference on Robotics and Automation (ICRA) 2026 接收——这在机器人圈的地位,相当于音乐人拿到了科切拉音乐节(Coachella)的头牌入场券。该系统允许一组四足机器人协作抬起并移动沉重、难以抓取的物体,比如原木、油桶,甚至是一个沙发,而整个过程不需要哪怕 1 比特的通信。没有主控节点,没有 Wi-Fi 信号,更没有频繁的关节级指令交换。相反,协作纯粹源于机器人对所搬运物体受力的“感知”,仅依靠其自身的内部传感器——这种概念在专业领域被称为“本体感受”(proprioception)。
这套系统的神来之笔在于一种通过巧妙的“星座奖励”(Constellation Reward)系统训练出的共享策略,它激励机器人的行为表现得就像是刚性连接在载荷上一样。这种去中心化的方案表现出了令人震惊的效率和可扩展性。该策略在模拟环境中仅用两台机器人进行训练,但在无需任何重新训练的情况下,就可以直接推广到多达十台机器人的团队中。这完美避开了困扰多机器人系统的“网络噩梦”——在传统系统中,增加更多的智能体往往会导致令人抓狂的延迟和指数级增长的复杂度。
为什么这至关重要?
这项研究彻底颠覆了一个普遍的固有认知:即机器人越多,麻烦越多。在 decPLM 框架下,机器人数量的增加反而意味着误差的“减法”。研究团队发现,随着机队规模从 2 台扩展到 10 台,载荷的跟踪误差竟然骤降了 80%。大型团队的冗余性自然而然地抵消了单个机器人的失误,从而实现了更平滑、更精准的操作。
通过甩掉“通信”这根拐杖,Oregon State 创造了一个本质上更鲁棒、更具扩展性且适应力更强的系统。它指向了一个未来:部署一群物流机器人将变得像在组群里加个新人一样简单,而无需重新架构整个网络。正如原作者一针见血指出的那样,这项工作证明了:“机器人技术的瓶颈早已不再是硬件能力,而是机器学习的基础设施(ML Infrastructure)。”