那些在柏油马路上练滑板练到“平地摔”的少年们,现在可能要感到压力了。研究人员刚刚教会了人形机器人如何玩转滑板。
2026年2月3日,arXiv上发表的一项研究展示了名为 HUSKY(Humanoid Skateboarding System,人形机器人滑板系统)的黑科技。这是一个具备物理感知能力的AI框架,它让双足机器人成功挑战了那个动态极其不稳定、机械耦合极其复杂的“噩梦”:在一块带轮子的木板上保持平衡并自由疾驰。
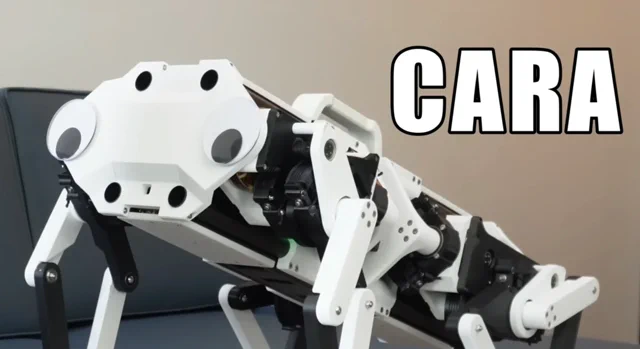
这次实验的“受害者”——或者说幸运儿——是来自宇树科技的 Unitree G1。这位身高1.3米、体重约35公斤的人形机器人,起售价约为1.6万美元。此前它已经展示过跳舞和基础的物体抓取,而现在,它的简历上又多了一项:“滑板公园头号玩家”。HUSKY系统将全身控制(Whole-body control)与对滑板动力学的深刻理解相结合,精准建模了板面倾斜与支架(Trucks)转向之间的复杂关系,使机器人能在蹬地加速和压板转向之间丝滑切换。为了让动作看起来更像“板仔”而非生硬的机器,系统还采用了对抗性运动先验(AMP)技术,让机器人通过模仿人类的运动风格来自主学习,而不是被死板地设定每一处关节的扭矩。
这为什么意义重大?
教机器人玩滑板可不只是为了给未来的“机器人奥运会”整活。这项研究真正触及了人形机器人在不可预测的现实场景中,全身协调控制的“天花板”。滑板作为一个典型的欠驱动(Underactuated)平台,要求机器人必须具备极高的平衡感、动量管理能力以及复杂的人机物交互能力。
HUSKY背后的原理完全可以迁移到其他带轮工具的操控上,或者帮助机器人在拥挤、动态的人类环境中行走时,不再被自己的脚拌倒。这是迈向“灵巧机器人”的关键一步——让它们不仅拥有工厂机械臂的精准,更拥有像人类一样适应环境的灵动与韧性。