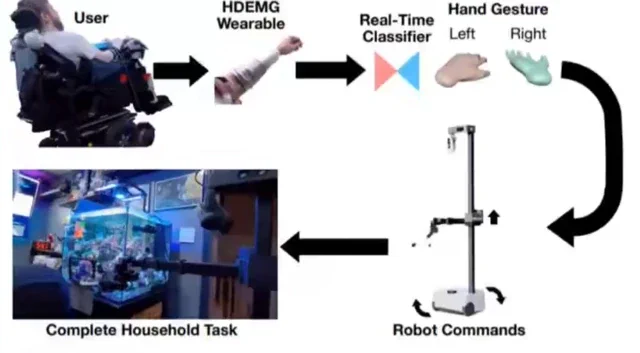
卡内基梅隆大学和英伟达的研究人员显然是拍板决定了:机器人,就像实习生一样,也应该从自己的失误中学习。他们推出了一项名为 PLD(探测、学习、提炼)的全新框架,旨在让视觉-语言-动作 (VLA) 模型能够自主提升在高精度任务中的表现。这彻底告别了传统的、耗时费力的人工演示模仿教学法——要知道,那种方法的可扩展性,简直就像手工雕刻微芯片一样“高效”。
PLD 方法是一个三阶段流程,旨在将失败转化为功能亮点。首先,机器人会利用其现有知识尝试一项任务,从而“探测”自身的局限。当它不可避免地搞砸时——比如,把本该端上的饮料洒了一地——一个通过残差强化学习训练的轻量级“救援策略”就会介入,纠正其动作。最后,系统会“提炼”这次成功的纠正经验,用新数据微调主模型。本质上,每次失败,机器人都会变得更聪明一点,完全不需要人类手把手地指导。这套系统已经在 LIBERO 基准测试中达到了 99% 的成功率,在某些真实世界操作任务中更是达到了 100%。
为什么这意义重大?
这是向创造真正适应性强的机器人迈出了重要一步。机器人不再需要为每一种可能的情况预设一套完美的动作库,配备 PLD 的机器人可以从新颖、不完美的经验中生成自己的训练数据。这种自我完善的循环有望大幅缩短开发时间和成本,使机器人更适合在复杂、非结构化的环境中工作,比如你那乱七八糟的厨房。这是一种从“看中学”到“做中学”的转变,更重要的是,它教会了机器人“从差点搞砸中学”。