如果你曾试图打造一只机器手,你就会明白那简直是工程师的头号梦魇。要复制人类手部那精巧、灵活的抓取能力,这在机器人学界简直是终极挑战之一。其核心挑战并非仅仅增加更多关节,而在于如何创建一个系统,使其能够适应不规则形状的物体,同时又无需为每个关节配备一个沉重、耗能的电机。市面上大多数设计,要么太过僵硬,要么过于复杂,要么脆弱得不堪一击,难以在真实世界中立足。
此时,特斯拉登场了。一份最近公开的关于Optimus第二代机器手专利申请(WO2024/073138A1),揭开了其设计理念的神秘面纱,那简直是堪称极致效率的教科书式典范。特斯拉的工程师们并没有一味追求复杂,而是巧妙地运用物理原理、坚固的机械结构,并秉持着一种设计理念,它仿佛在呐喊:“为大规模生产而生,而非仅仅为了演示而造!”
欠驱动的优势
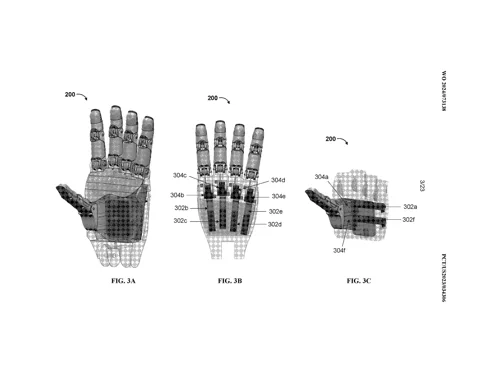
特斯拉设计的核心是一种“欠驱动”(underactuated)系统,其理念在于使用的电机数量少于总关节数。对于Optimus机器手而言,六个执行器驱动着十一个关节——其中两个用于拇指,其余四个手指各一个。这通过一个缆索驱动系统实现,其运作方式酷似生物肌腱。每根手指中都穿过一根缆索,当缆索被拉动时,它会使关节以一种自然、依序的动作弯曲。
这种方法巧妙地解决了适应性难题。由于关节不会被强制固定在僵硬、预设的路径上,手指能够被动地适应物体的形状,无论是粗犷的电钻还是一枚脆弱的鸡蛋,都能轻松应对。这是一种“机械智能”的形式,它巧妙地将复杂的抓取计算从软件层面转移到了硬件自身。
但特斯拉的工程师们又在此基础上,注入了一份绝妙的巧思。每根手指根部关节的扭力弹簧,被刻意设计得比指尖的弹簧更硬。这创造了一种“被动智能”:较弱的指尖关节会首先弯曲,环抱住物体,随后较强的根部关节再跟进。如此一来,无需机器人中央处理器劳神费力地“过度思考”,就能自动确保牢固的“笼式”抓取。
蜗轮蜗杆传动:免费“抱”起重物
也许,隐藏在专利文件中的工程巧思,最是神来之笔——那便是为执行器采用了蜗轮蜗杆传动。这不仅仅是将电机的旋转转化为缆索的拉动;这更是一项物理学上的“黑科技”,对效率有着巨大的影响。
蜗轮蜗杆传动通常具有“不可逆”(non-backdrivable)的特性。由于其高摩擦力以及齿轮的陡峭角度,输出的蜗轮无法反向驱动输入的蜗杆。对于机器人而言,这简直就是一项超能力!一旦Optimus抓握住重物,这些齿轮就能机械性地锁死抓握姿态。电机可以完全放松,以零电量消耗保持住重量。相较于那些必须持续耗电与重力抗衡的直驱式机器手,这对于电池续航和散热管理而言,无疑是一场里程碑式的胜利。
这种设计还在单一、紧凑的级联中实现了巨大的减速比,使得微型高速电机能够产生惊人的抓握力道,同时又能巧妙地封装在手掌内部。
为真实世界而生:耐用与精准的哲学
纸上谈兵的设计,若经不起千次循环的考验,便毫无价值。这份专利揭示了特斯拉对长期可靠性有着近乎偏执的追求。
在缆索驱动系统中,缆索疲劳和伸长是最令人头疼的故障源之一。特斯拉为此提出了两项绝妙的解决方案:
- 凸面曲线妙招:工程师们没有让缆索在关节处急剧弯曲,而是在手指连接处模塑出光滑的凸面曲线。这迫使缆索以安全的半径弯曲,极大地延长了其使用寿命。
- 自动张紧器:指尖内部隐藏着一个弹簧加载的机构,它持续拉紧缆索末端。随着时间推移缆索伸长时,它能自动收紧任何松弛部分,确保机器手多年保持紧致和响应灵敏,无需人工维护。
在传感方面,特斯拉巧妙避开了笨重且易故障的机械传感器。取而代之的是,在每个关节枢轴周围集成了一个永磁环。一个静止的霍尔效应传感器测量关节旋转时磁场的变化,从而提供精确、无摩擦、无磨损的角度检测。这种非接触式方法对于在数百万次循环中保持亚毫米级精度至关重要。
不只是一只手,更是一种哲学
细读专利文件中那些晦涩难懂的技术语言,一幅清晰的图景跃然纸上。特斯拉并非在打造一个实验室里的“奇珍异宝”;它设计的是一款旨在混乱、不可预测的真实世界中大规模生产和部署的产品。从不可逆的齿轮到自动张紧的肌腱,每一个决策都经过了效率、耐用性和可制造性的极致优化。
尽管其他仿人机器人或许会吹嘘拥有更多的自由度或更奇特的执行器,但Optimus机器手代表了一种务实的方法,专注于以最简洁、最坚固的方式解决机器人操作的核心问题。这份设计深谙一个道理:在真实世界中,实用性与高效能永远比花哨的复杂性更胜一筹。而这,也正是这份设计最引人入胜之处,远胜于任何单一的功能特性。
