
RoboFeed
ABB 利用仿生手赋予机器人人类般的触感
ABB 机器人与 PSYONIC 合作,利用先进假肢手的数据训练工业协作机器人,旨在解决自动化领域最严峻的灵巧性挑战。

Unitree, known for affordable robot dogs, just unveiled the GD01: a 500kg manned, transformable mecha with a staggering price tag.
ABB 机器人与 PSYONIC 合作,利用先进假肢手的数据训练工业协作机器人,旨在解决自动化领域最严峻的灵巧性挑战。

无际科技推出的全新 WUJI Hand 2 效率提升 20% 并能通过电流感知扭矩,是灵巧机器人操作领域的重大突破。
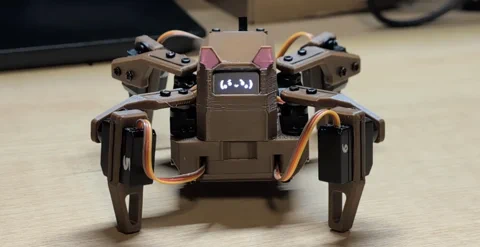
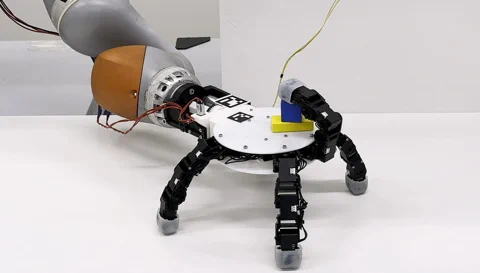
创作者 Dorian Todd 详细介绍了 Sesame Micro 的构建过程。这款 98 克、8 自由度的四足机器人据称是全球最小的自供电机器人狗。
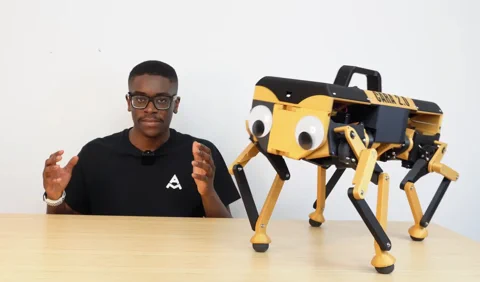
YouTuber Aaed Musa 的绳驱机器人狗迎来了重大升级,变得更便宜、更轻。但在一次典型的工程转折中,他决定放弃使其成名的绞盘驱动技术。
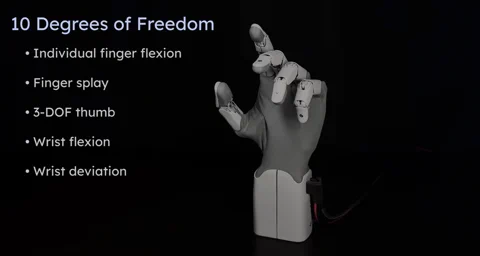
Gesture Platforms 在 Kickstarter 发布 HW1,这是一款可用户维修的 10 自由度机器人手,旨在弥补业余爱好者爪子与昂贵工业夹具之间的差距。

无极科技在首代产品发布仅八个月后便推出了无极手2,承诺显著改进其灵巧机器人手的散热性能。

麻省理工学院黑客松团队开发了一款 AI 系统,通过电肌肉刺激控制用户手部来教授新技能。我们确实赋予了 AI 身体。

Formlabs的Silicone 40A树脂让复杂的一体化软体机器人(如气动触手)在数小时内即可完成打印,无需数周

Neuralink首位人类患者展示了对物理机械臂的意念控制,这是从虚拟演示向现实应用迈出的重要一步。

DOBOT发布初息仿生具身智能3.0,这款栩栩如生的机器人恐龙既是技术突破,也让人联想到经典的科幻电影情节。

苏州柔触机器人突然发布了一款拥有24根肌腱且无电机的仿生手,直接挑战了Allonic和Clone的最新进展。
BrainCo 的 Revo 3 灵巧手具备 21 个自由度和全掌触觉传感器,无需外部摄像头即可完成剪纸等精细任务,机器人触觉技术迎来重大突破。
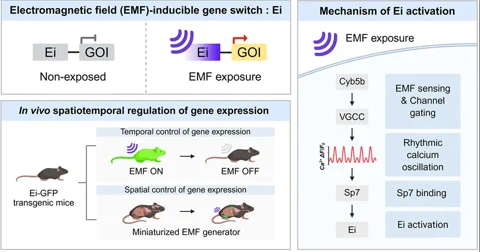
韩国研究团队开发出一种磁遗传开关,利用60Hz电磁场调控基因开关,成功逆转了小鼠的衰老标志。
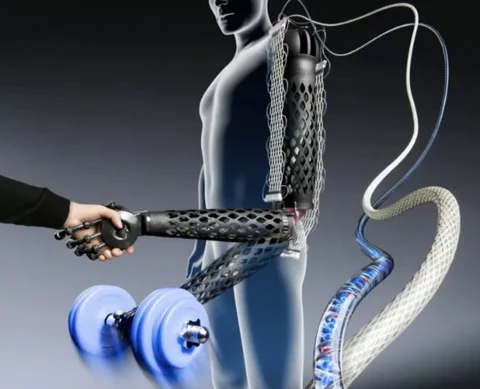
MIT 媒体实验室研究员 Ozgun Kilic Afsar 解释了新型电力驱动人工纤维背后的科学,这种纤维通过轻质强大的肌肉纤维取代笨重的电机,将彻底改变机器人技术。
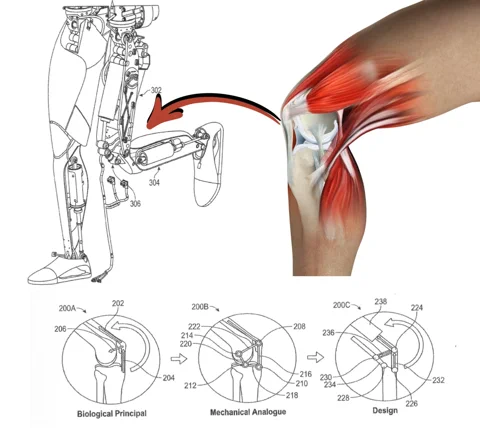
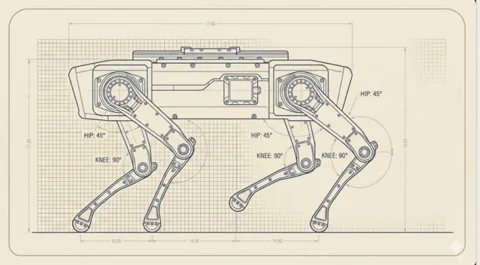
特斯拉 Optimus 膝关节专利揭示了模仿人体结构的方案,旨在降低大规模生产成本并提高效率。

澳大利亚初创公司 Cortical Labs 正式上线 Cortical Cloud 平台。现在,只要预算充足,任何人都能在云端租用并编程芯片上的活体生物神经网络。

洛桑联邦理工学院(EPFL)最新突破:这种可织入衣物的电流体纤维肌肉,无需笨重压缩机即可打造强力静音外骨骼,开启智能穿戴新纪元。
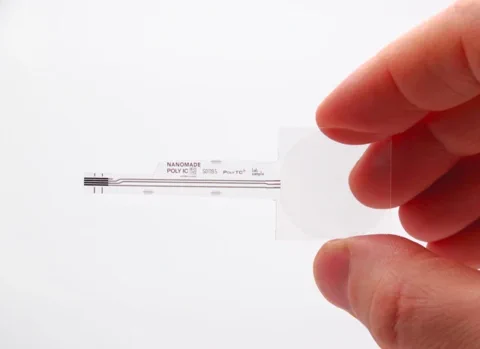
法国Nanomade与德国PolyIC联合打造出集电容触控与压力感应于一体的透明薄膜,助力新一代机器人触觉皮肤及隐形交互界面的实现。
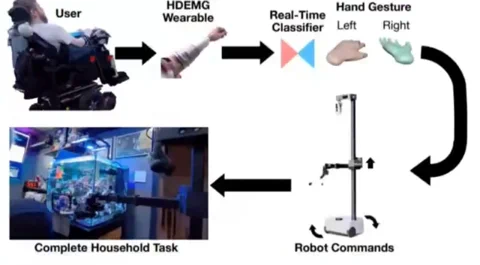
卡内基梅隆大学与 Hello Robot 合作研发了一套无创脑机接口系统,让高位截瘫患者仅凭意念和肌肉信号即可操控机器人处理家务。

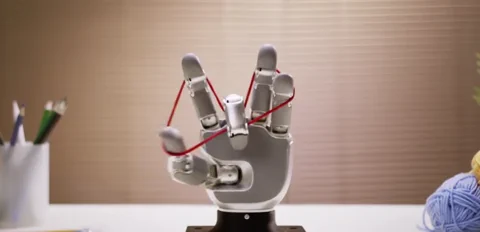
SoftSync 推出 FlexHand V1:一款专为开发者打造的 6 自由度坚固仿生手,早鸟价仅为 484 美元,震撼业界。

小米 CyberOne 人形机器人迎来重磅升级,全新仿生手引入液冷“流汗”技术,可有效解决高强度工业作业中的散热难题,显著提升操作稳定性。

中国机器人公司 Warmcore Tech 展示了其最新研发的仿生手,其动作的流畅度与真实感令人叹为观止,标志着仿生肢体技术的重大突破。

来看 Robonova.i V2 仿生机器人的首秀:在人类搀扶下,穿上新运动鞋,迈出略显笨拙却意义非凡的第一步。
具身智能进展为何不及预期?最新研究深度剖析了阻碍物理AI发展的现实困境:从粗糙的仿真器到硬件标准化的缺失,每一项挑战都关乎落地。

云深处科技(DEEP Robotics)展示了一款栩栩如生的机器人马。这款四足机器人拥有惊人的仿生细节,正逐渐模糊机器与生物之间的界限。

南科大研究团队开发出一款可穿戴机器人系统,充当人类的“第二双腿”,显著降低了搬运重物时的能量消耗。

EON 利用 FlyWire 连接组成功模拟果蝇大脑,在仿真实验中实现 91% 的行为准确率。这是否意味着人类离真正的“意识上传”又近了一步?

深度解析匈牙利初创公司 Allonic。该公司刚完成该国史上最大规模种子前融资,旨在攻克机器人领域最难的关卡:硬件躯体制造。
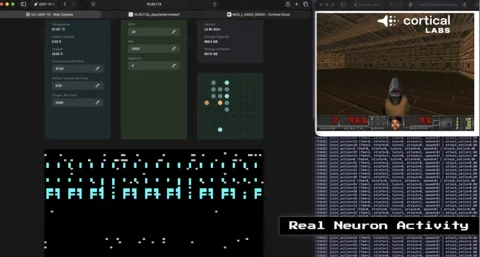
继教会 20 万个培养神经元玩《毁灭战士》后,Cortical Labs 将其接入大语言模型,利用生物脉冲生成文本,模糊了碳基与硅基的界限。

开源项目 Kinexus 震撼发布:通过 EEG 脑电头显,仅凭意念即可操控人形机器人集群,彻底解决机器人车队管理难题。

中国 TienKung3.0 人形机器人成功结合非侵入式 BCI 技术,无需手术植入即可意念翻书。这是辅助技术领域避开手术风险的一次重大飞跃。

匈牙利初创公司 Allonic 完成创纪录的 720 万美元种子前融资,利用其创新的 3D Tissue Braiding 制造平台,助力复杂机器人规模化生产。

索尼揭晓微创手术机器人原型,不仅成功缝合玉米粒,更助力非专业人员完成0.6mm极细血管吻合,开启精准医疗新篇章。

Fourier 展示了结合脑机接口 (BCI) 与外骨骼的同步控制系统,让机器人化身职场物理替身,开启远程办公新纪元。
受《终结者》启发,EPFL研究人员开发出一种可拆卸机器人手,利用低熔点合金手掌实现液化变形,从而完美抓取任何形状的物体。

法国医疗科技公司 Robeauté 正在开发一种可控的毫米级微型机器人,用于导航大脑复杂通路,实现更安全的神外科手术。
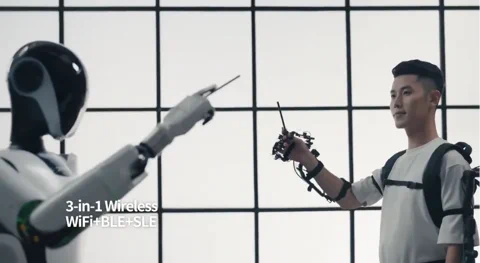
Daimon Robotics 等公司使用外骨骼遥操作技术捕获高质量的真实世界数据,加速人形机器人学习。

新视频展示了 Neuralink 患者仅凭脑机接口实时操控数字手,是该技术的一大进步。
香港研究人员开发出一种具有类人痛觉反射的神经形态电子皮肤,使机器人更安全、易于修复。

中国大学生造出逼真仿生蝴蝶,它扑动翅膀的样子令人惊叹。这是艺术、科学,还是我们新昆虫霸主的开端?
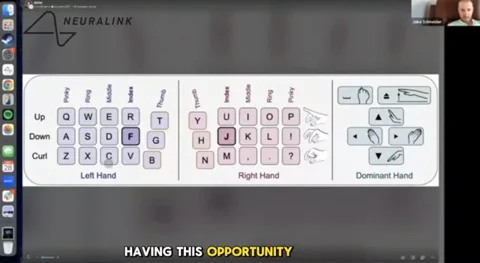
据报道,一名患有肌萎缩侧索硬化症(ALS)的Neuralink患者用意念打字速度达到每分钟141个单词,接近专业打字员的速度。科幻已成现实。